Bio Inspired Flight Control
 Allice: Bat inspired Micro Aerial Vehicle
Allice: Bat inspired Micro Aerial Vehicle
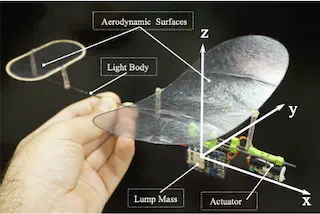
This work explores the use of center of gravity reallocation for the control of robotic systems. In particular we attempt to use the mechanism employed by biological bats in their landing maneuvers with a micro aerial vehicle (MAV) called Allice. Allice is capable of adjusting the position of its center of gravity (CG) with respect to the center of pressure (CP) using nonlinear closed-loop feedback. In the case of flying machines, CoM reallocation leads to the change in CG-CP distance of the system. In the case of robots with no aerodynamic surfaces, CoM reallocation leads to manipulating the torques produced by numerous forces acting in the system. For the control of robotic systems, we employ nonlinear control techniques. This nonlinear control law, which is based on the method of input-output feedback linearization, enables attitude regulations through CoM reallocation in the system. To design the model-based nonlinear controller, the Lagrangian dynamics of the system are considered, in which the aerodynamic coefficients of lift and drag are obtained experimentally. This work covers the design, system identification and nonlinear controller design. The performance of the proposed control architecture is validated by conducting several flight experiments.