3D Imaging and Analysis for Road Maintenance
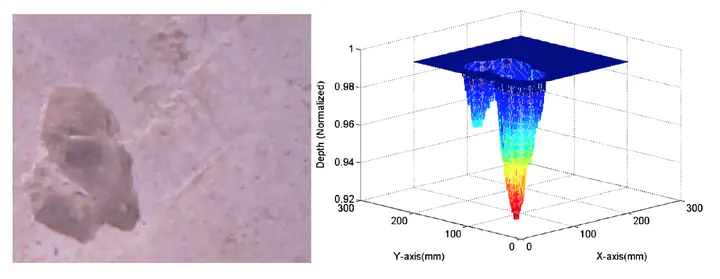 Natural pothole and its 3D reconstruction
Natural pothole and its 3D reconstruction
Potholes are a frequent occurrence in many parts of highway networks and are a source of irritation to drivers and a key concern for road maintenance authorities. These localised defected areas also reduce ride quality and potentially create a dangerous driving condition. This work presents a performance analysis of Kinect as a sensor for pothole imaging and metrology. Depth images of paved surfaces are collected from concrete and asphalt roads using this Kinect. Three-dimensional (3D) meshes are generated for a variety of pothole configurations in order to visualise and to calculate their different metrological features. The sensor is benchmarked using a test-rig with pothole-like depressions or artificial potholes of known dimensions to evaluate sensor performance under different real-life imaging conditions, such as through the media of clear, muddy and oily water. This work suggests a low cost solution for estimating the cost of road and pavement maintenance.