Mobile robot path planning in dynamic environments
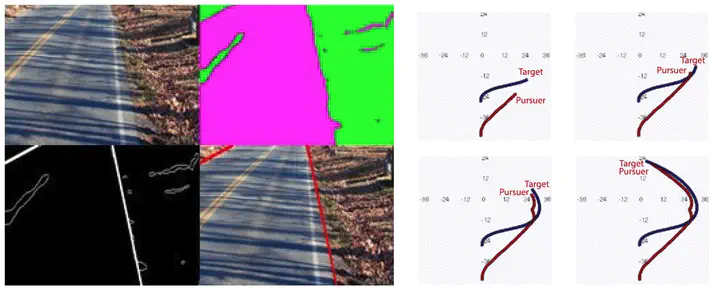 Road segmentaion using SOM and dynamic path planning
Road segmentaion using SOM and dynamic path planning
Real time path planning for mobile robots requires fast convergence to optimal paths. Most rapid collision free path planning algorithms do not guarantee the optimality of the path. In this project we studied Neural Network and Cellular Automate based approachs for mobile robot path planning. Simulation studies and experiments are conducted in both static and dynamic environments which verifies that the proposed algorithms generates robust and time efficient path planning schemes for finding optimal paths. Additionally, performance comparisons with popular path planning algorithms such as A*, Dijkstra’s and D* is also covered in this work.